HOME
>
Research
>
Robot vision group
> Example
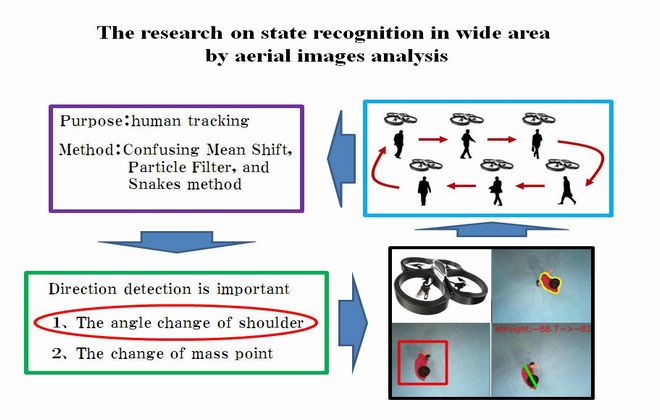
A study on situation recognition in wide area by aerial image analysis