ロボットビジョングループ
『親和的情報空間』に所在する人物や他ロボットの状況を認識し,コミュニケーションを行う自律移動ロボットに関する研究を実施しています. また,ロボットに搭載したカメラと移動環境に設置したカメラを併用することにより,自律移動に必要な機能である,自己位置検出,障害物検出・認識,移動環境認識・地図作成などの実現をめざした研究も行っています.
コア技術: オプティカルフロー処理・認識,移動ロボット制御,屋外状況認識(無人自動車向け)
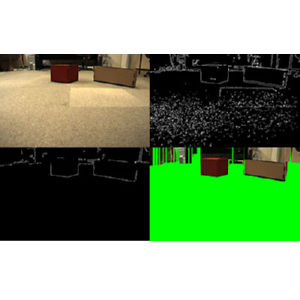
研究例1:エッジ処理による障害物検知
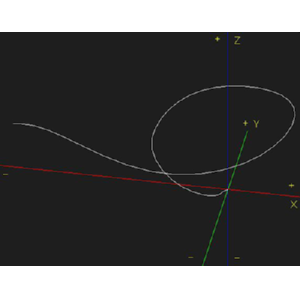
研究例2:加速度センサーによる円状軌跡