移動観測系における移動物体認識の研究
1.研究目的と背景
我々の研究室では、「人間とコンピュータが自然かつ自在にコミュニケーションを取れる環境」のシステム構築を長期目標にして研究開発を行っている。この研究を親和的情報空間(Friendly
Informative Cyber Space : FICS)と呼ぶ。本研究は、この一環として移動物体認識エージェントの開発を目標においたものである。
2.全体の処理の流れ
処理の流れを図1に示す。
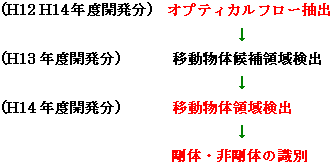
図1 全体の処理の流れ
移動物体認識エージェントは、オプティカルフロー抽出、移動物体候補領域検出、移動物体領域検出、剛体・非剛体の識別、の4つのサブシステムから構成される。まず、取り込んだ画像各点の動きベクトル(オプティカルフロー)を抽出し、このフロー情報を解析する事により移動物体候補領域の検出を行う。次に移動物体候補領域内の明度情報(最大値と最小値)を取得し、移動物体候補領域を中心とした135画素×135画素の拡大領域内で、明度が最大値と最小値の間にある所を移動物体領域とする。さらに移動物体領域内のフローを抽出、量子化して分散値を求め剛体・非剛体を識別する。今年度は、オプティカルフローの改良(水平・垂直方向のフローの排除とエッジ強度の大きい部分の排除)と移動物体領域の検出、剛体・非剛体の識別の開発を行った。剛体とは移動物体領域内のフローが、たとえば自動車の様に同じ角度で向いているものを指し、一方人間の様にこの条件を満たさないものは非剛体と定義した。
3.移動物体領域の実験結果
カメラ直進、人物移動の実験結果を図2に示す。 図中の白枠は拡大領域を表し、青色表示部分は移動物体領域を表す。

図2 移動物体領域の実験結果
4.剛体・非剛体の識別結果
カメラ直進、非剛体移動の実験結果を図3に示し、カメラ直進、剛体・非剛体移動の実験結果を図4に示す。剛体を緑色、非剛体を赤色で表した。

図3 非剛体の識別結果

図4 剛体・非剛体の識別結果
5..まとめ
オプティカルフロー抽出の改良により、誤りフローが減少し、移動物体候補領域の検出がより正確になった。さらに、移動物体領域の検出により移動物体の形状にほぼ対応した検出が可能となった。また、剛体・非剛体の識別も実現し全体のシステムを完成させた。