ロボットビジョングループ
空中映像の解析によって,広域情報モニタリングを行い,ARマーカでの飛行ロボットの制御に関する研究を実施しています。 また,自律移動ロボットを用いて,人物追跡,障害物検出・認識,音声認識等を行うことにより,人物の買い物支援,介護支援などの実現を目指した研究を行っております.
キーワード:
空中映像解析,広域状況認識,ARマーカ,ロボット制御,キネクト,ステレオカメラ,音声認識 ,自律移動ロボット,個人認証,人物追跡
コア技術:
ジェスチャー認識,パーティクルフィルタ,ミーンシフト,動的輪郭モデル,カルマンフィルタ,マルチテンプレートマッチング
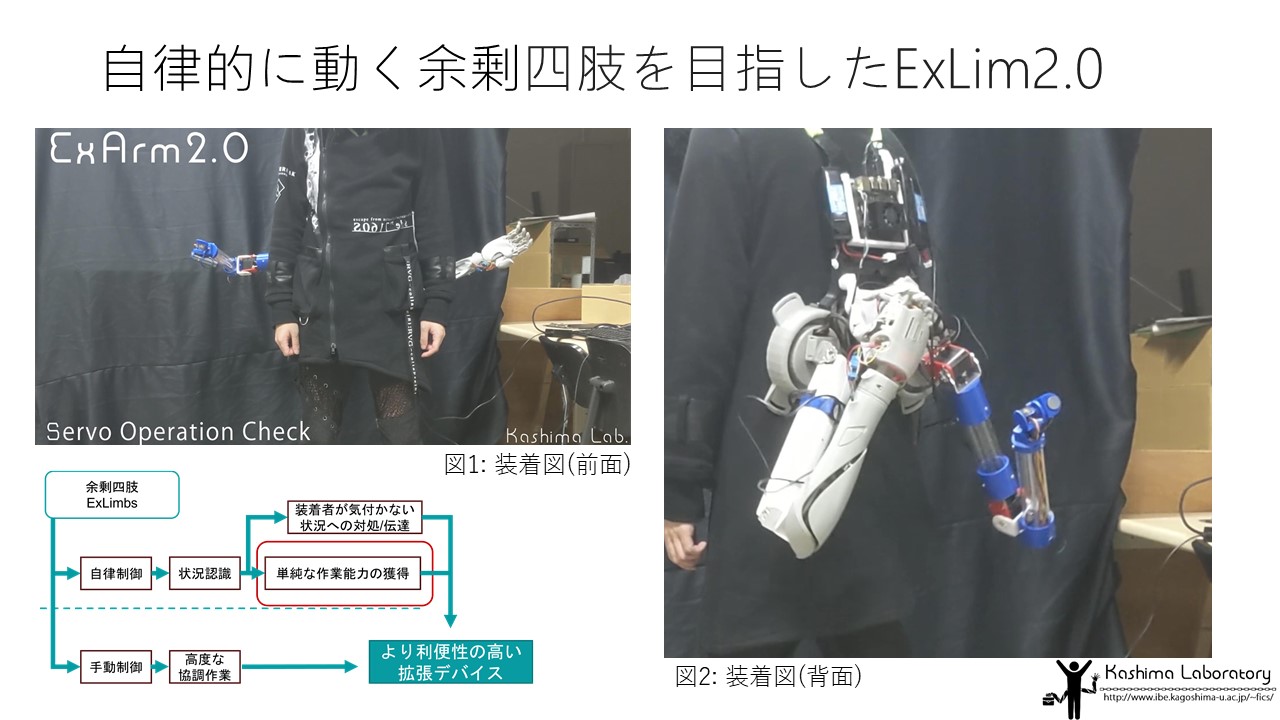
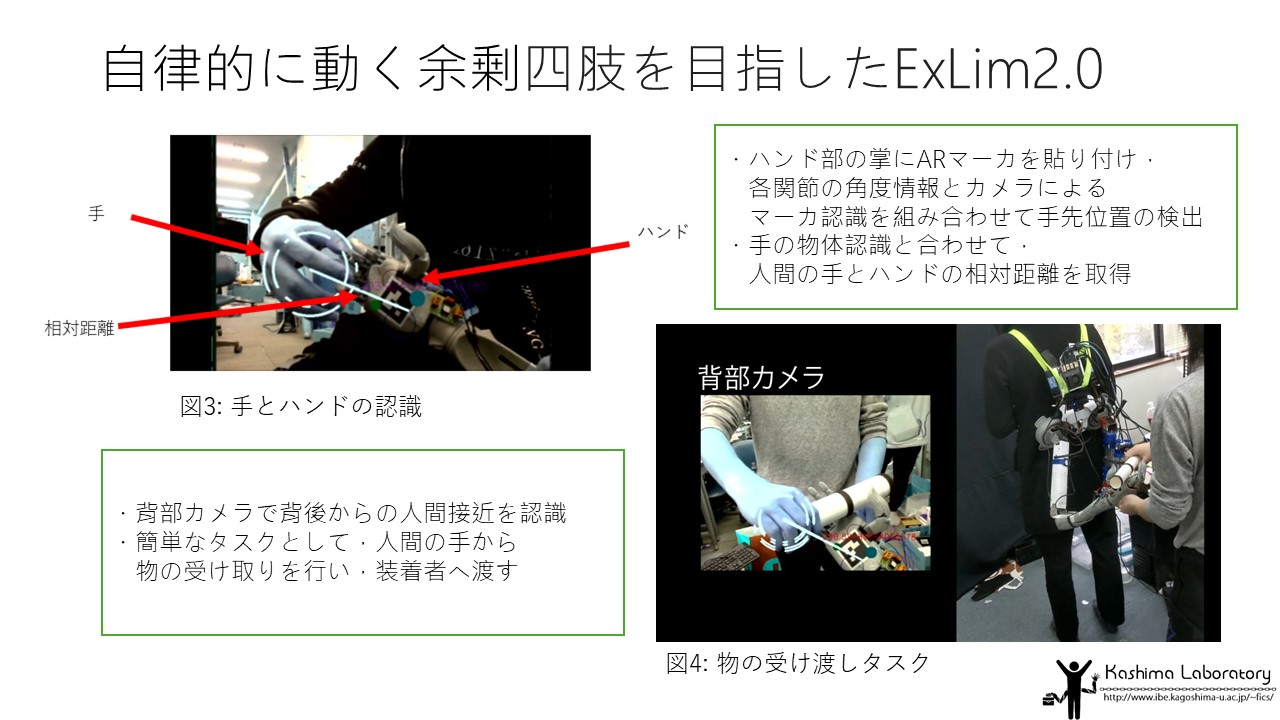
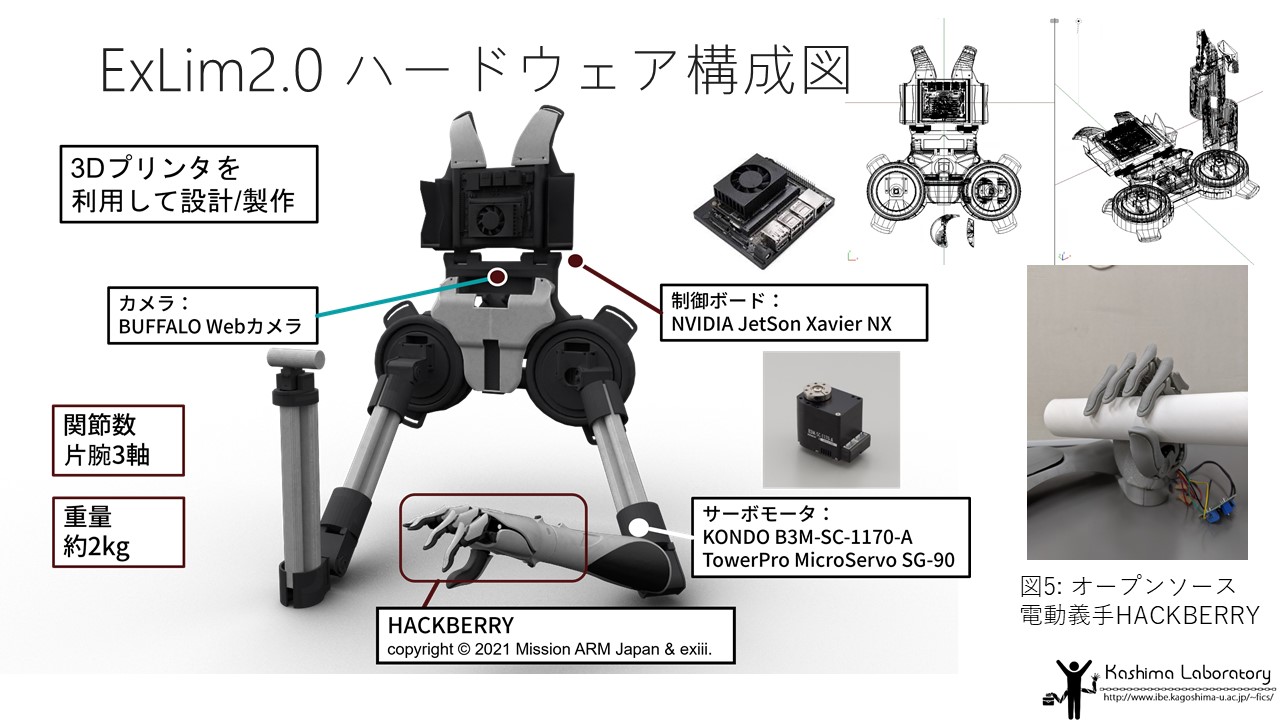
研究例:自律型エクストラアームによる人間拡張に関する研究

その他の研究例:
追跡ロボットにおける対象消失問題の解決に関する研究
出典:山田純一,外園宙,山中隆,鹿嶋雅之,佐藤公則,渡邊睦,
“追跡ロボットにおける対象消失問題の解決に関する研究”,
電子情報通信学会技術研究報告 パターン認識・メディア理解(PRMU),Vol.107,No.539,pp.469-476,(2008.3)
親和的情報空間における自律移動ロボット制御に関する研究
出典:梅谷綾,鹿嶋雅之,佐藤公則,渡邊睦,
“親和的情報空間における自律移動ロボット制御に関する研究”,
平成21年度電気関係学会九州支部連合大会(第62回連合大会)講演論文集,09-2P-09,(2009.9)
空中映像解析における飛行体自動制御に関する研究
出典:鹿嶋雅之,吉田純,佐藤公則,渡邊睦,
“空中映像解析における飛行体自動制御に関する研究”,
第15回画像の認識・理解シンポジウム(MIRU2012)論文集,DS-12,(2012.8)
空中映像解析による広域状況認識に関する研究
出典:姜淦文,鹿嶋雅之,佐藤公則,渡邊睦,
“空中映像解析による広域状況認識に関する研究”,
日本ロボット学会第30回学術講演会論文集,4F3-6,(2012.9)