Robot Vision Group
We research on autonomous mobile robot, recognizing and communicating the situation of persons/other robots in "Friendly Informative Cyber Space". And we also research on how to realize an autonomous navigation system (Self-position detection, obstacle detection/recognition, environment recognition, map making) which uses cameras installed robots and cameras set on environment.
Core Techniques: Optical Flow Proccess・Recognition,Movable Robot Control,Outdoor Scene Recognition (For Unmanned Vehicle)
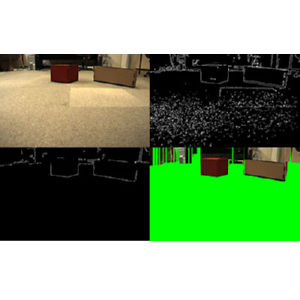
Researce example 1: Find obstacles based on edge information
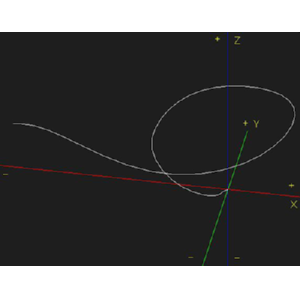
Research example 2: Tracking data by Acceleration sensor