3次元環境モデル作成の処理の流れは、前処理と微分処理、特徴点候補抽出および選択処理、対応付け、基礎行列計算、3次元情報推定およびVRML呈示である。以下に各処理の内容について述べる。尚、特徴点抽出および選択処理は前年度研究における手法を利用している。
(1) ノイズ除去処理と微分処理 前処理として、ノイズ抑制に有効であり、面領域の境界でエッジを保存するメディアンフィルタを入力画像に施した。また、物体の境界周辺を特徴点候補抽出処理の探索範囲とするため、エッジ強調処理を行った。
(2) 特徴点候補抽出および選択処理 対象物の特徴点である角点を抽出するのに有効であるHarris Corner Detectorを用いた。また、Harris Corner Detectorの最も角点に類似した場所でレスポンス関数が局所最大の出力を持つという特性を用いて、特徴点候補の中から対象物上に存在する真の特徴点の選択を図った。
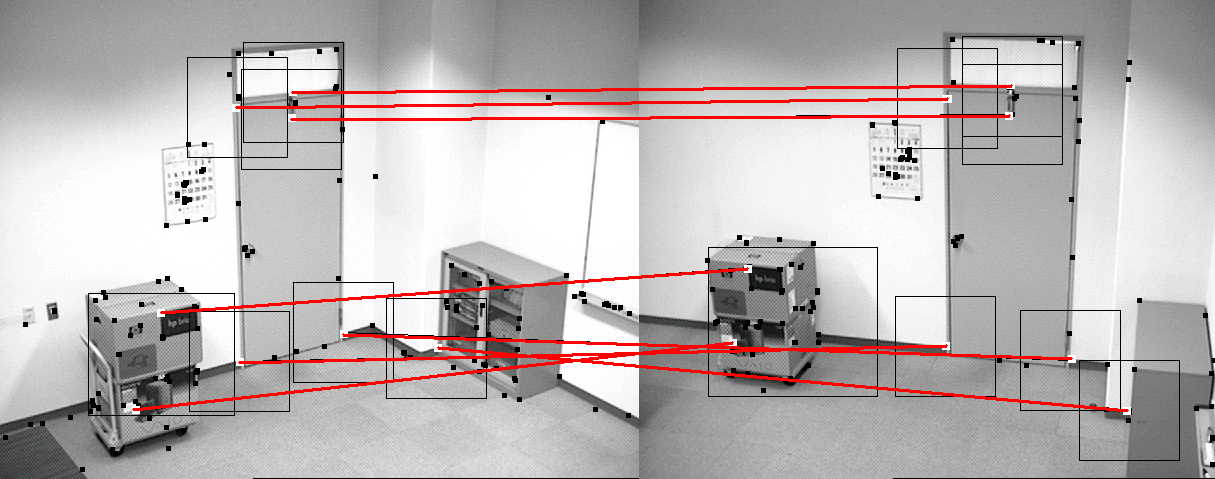
(3) 対応付け 各特徴点対に対し、対応付けの正しさを定量的に評価する信頼性評価値を計算し、閾値処理より正しい対応付けを求めた。また、特徴点を中心とするマスク画像において、特徴点の位置関係を利用して対応付けの精度の更なる向上を図った。
(4) 基礎行列計算 両カメラ間の情報をもつ基礎行列を、8点の対応点対から求めた。基礎行列Fと対応点m1、m2の座標の間には、(式1)の基礎方程式が成り立つ。
![]() …(式1)
…(式1)
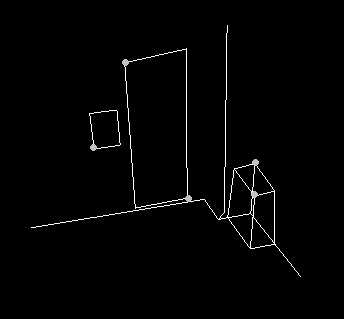
(5) 3次元情報推定およびVRML呈示 基礎行列から透視投影行列を求め、推定した各特徴点の3次元座標からVRMLでワイヤーフレームモデルを生成した。